3D Sole App
3D Sole App, becoming acquainted is a must
The brand-new BORGinsole 3D Sole App is a bravura performance involving the implementation of mathematical algorithms in the biomechanics of a 3D foot model, and is entirely different from any other form of 3D sole design software.
On the one hand, the 3D Sole App remains faithful to the biomechanical correlation of the axes of hindfoot and midfoot, while on the other these axes can rotate vis-à-vis one another in accordance with the BORGinsole patent.
Unequalled software technology
Many software packages link a scan to a virtual foot model from a library. Others work with limited manipulation possibilities that are not always individually linked and moreover with a low to very low inter- and intra-tester reliability.
Others are a do-it-yourself kit of sole elements that have nothing to do with the original foot. Often one obtains a result that doesn´t really correspond to what one had in mind.
Here the BORGinsole 3D Sole App aims to make a big difference.
BORGinsole relies on:
- high accuracy
- high validity
- high reliability
- high repeatability
- highly academic pursuit
In brief: what the software does is perfect, and if you perform the same action 10 times, you also get the same result 10 times, whoever has their hand on the mouse button.
The BORGinsole 3D Sole App is very user-friendly, fast, not complicated, allows each step to be clearly seen and also permits all possible corrections.
Your own BORGinsole in 7 clicks
Via the easy completion of the necessary parameters for the processing of the 3D foot model, these variables will be immediately recognised by the 3D sole APP. Errors are excluded and not a single parameter can be forgotten. The architectonic sole plan drawn up by the podiatrist is automatically implemented in 7 algorithmic steps by the 3D Sole App. If necessary, the designer can adjust after each step.
For production, you can mill out the BORGinsole via CNC 3D or, if desired, 3D print it.
Watch the robotized production process
The BORGinsole 3D Sole App is developed with support from the Innovation Centre and IWT (Agency for Innovation by Science and Technology).
Step-by-step plan 3D Sole App
-
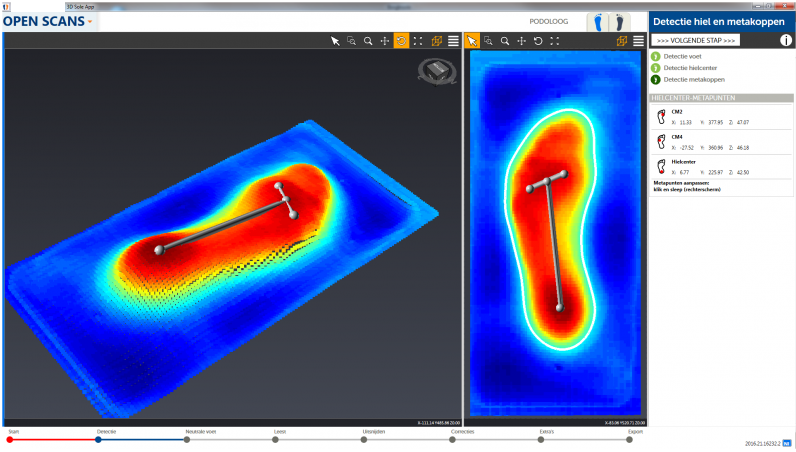 1
1Detect heel and metatarsal heads
-
 2
2Determination of neutral “ZERO foot”
-
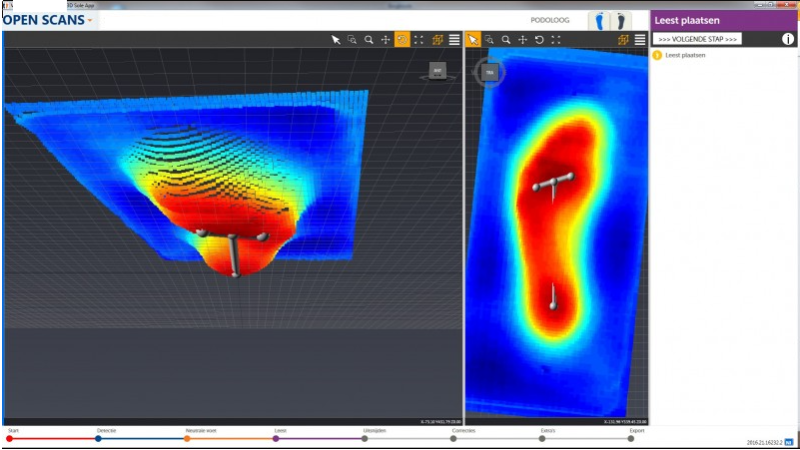
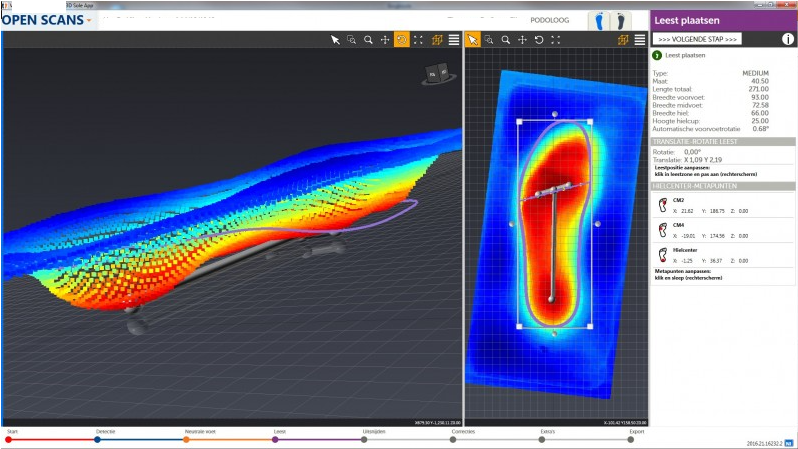 3
3Placement of the indicated last
-
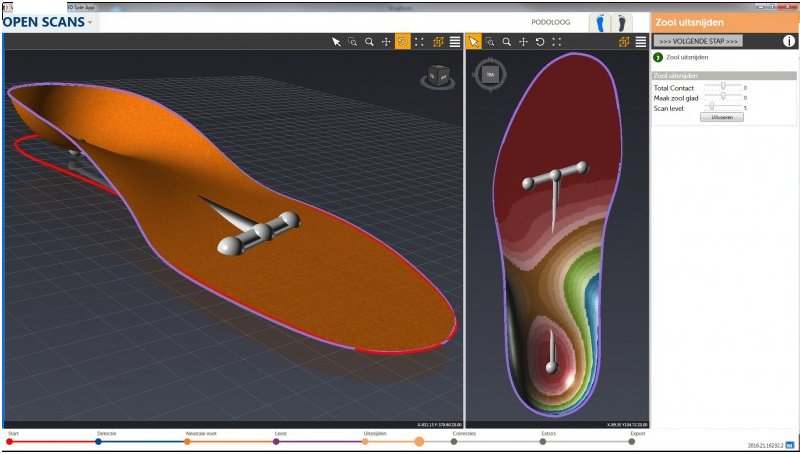 4
4Cutting out of the sole from scan
-
 5
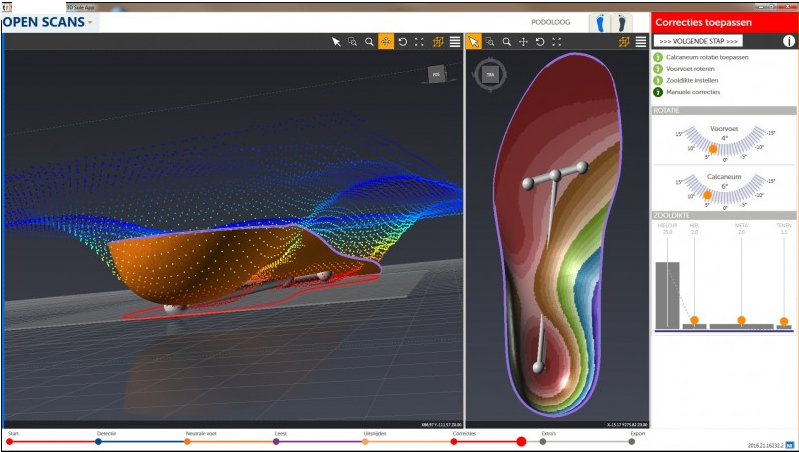
5Application of corrections: including hindfoot and forefoot, lift, minimum thicknesses per zone
-
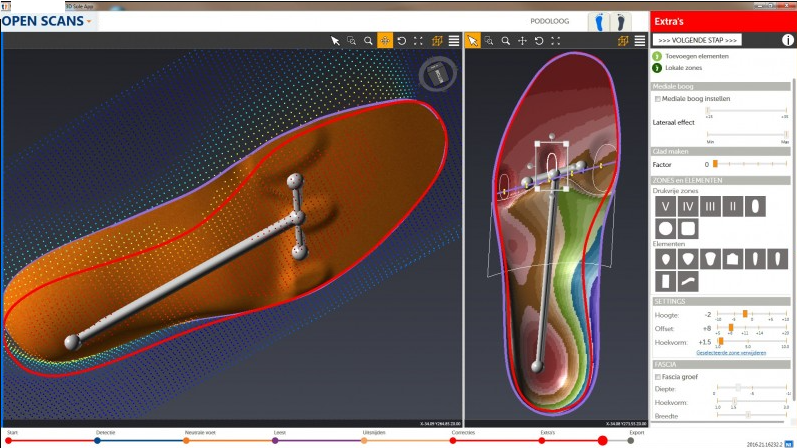 6
6Application of elements, kinetic wedge, etc.
-
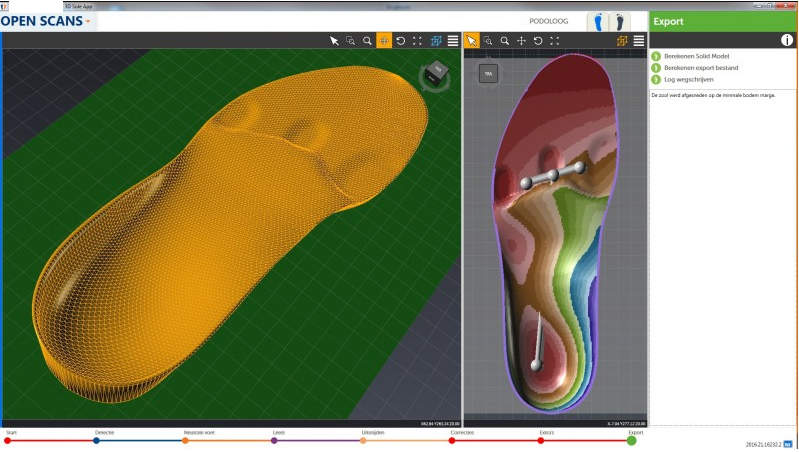 7
7Export of the finished sole
 Discover
Discover
 Discover
Discover
") Discover
Discover


